Uddhav Bhattarai’s Three Minute Thesis
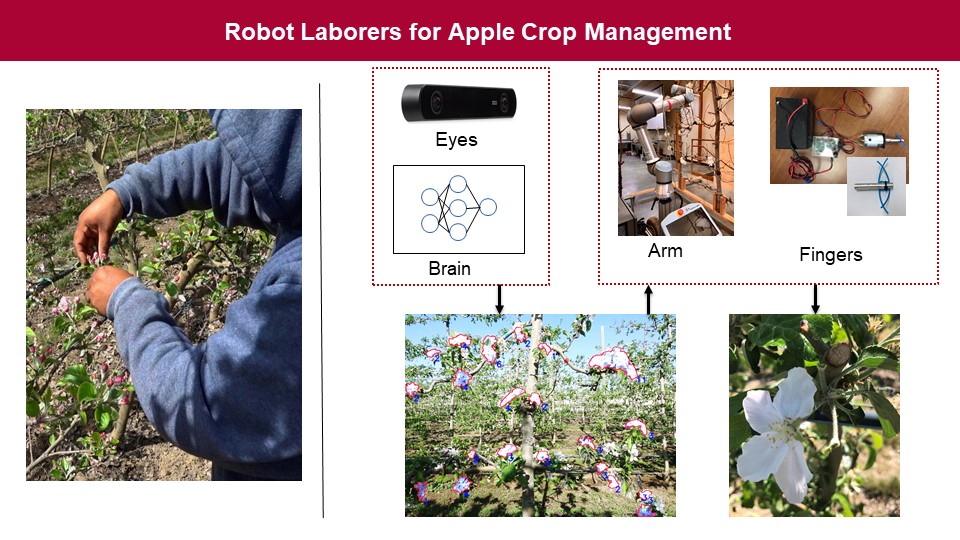
Robot Laborers for Apple Crop Management
Currently, tree fruit production is mainly dependent on labor-intensive manual field operations such as training, pruning, blossom/flower thinning, and green fruit thinning. These field operations are vital for developing desired tree shape and size, and optimizing crop load, yield, and quality. Blossom thinning, specifically, is one of the crucial crop-load management approaches, which controls the current season fruit yield, color, size, and internal quality parameters (e.g., sugar content) and the coming season’s return bloom. Every year growers rely on manual laborers to selectively remove excess flowers, which is one of the major components of the annual production cost. My study proposes a robotic blossom thinning system to perform precision flower removal in apple orchards. Information from the camera system processed via artificial intelligence algorithms, and the robot motion plan is used to navigate the end-effector to the desired location to remove the expected proportion of flowers from target clusters.

Uddhav is a Ph.D. candidate in the Department of Biological Systems Engineering. With a background in electrical engineering, his research interest is in the intersection of computer vision and robotics to develop automated solutions for agricultural applications. His current research is in development of robotic solutions for crop-load management in tree fruit crops (e.g., apples).
In his free time, Uddhav loves to explore the beautiful Pacific Northwest.